3 带渐开线. 假如不从头装置电机,则专业地抛弃处理电机或进行防锈处理并寄存。
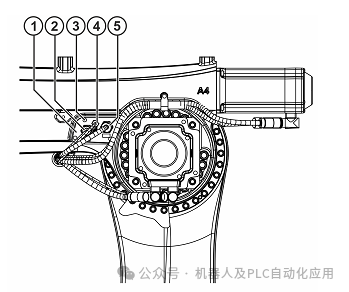
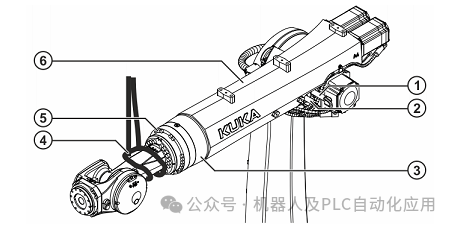
5. 将电机插头 XM6 和 XP6 以及或许有的吹洗空气管从板背面上松开并拔下。
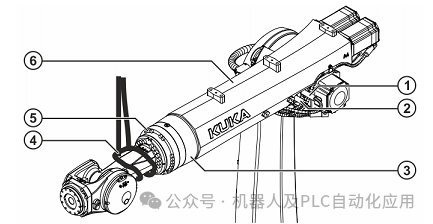
7. 小心肠从机器人小臂上松开机器人手腕并用起重机拉出机器人手腕。拉出时不得倾斜。机器人小臂和机器人手腕之间的空隙在圆周上的任何部位都有必要相同。在拉出的一起移动起重机。
2. 装置前先清洁一切啮齿,然后涂上少量 润滑脂 Microlube GL 261,但
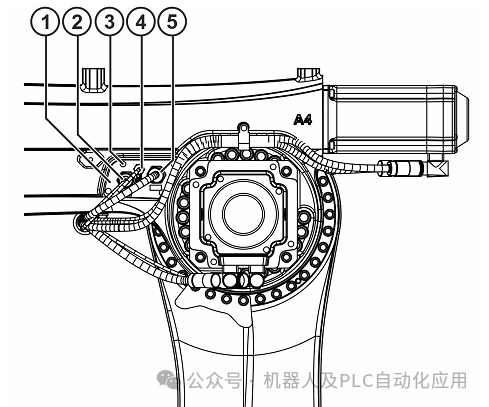
1. 安置好电机插头 XM6 和 XP6,使其在刺进电机后倾斜地坐落左下方。
2. 将 A6 的电机装入机器人手腕内;装置时不要倾斜,留意是否正确固定(啮合)。
3. 装入 4 个内六角螺栓 M8x30-8.8-A2K。分几回逐渐添加拧紧扭矩至规则的数值。
3. 将机器人手腕装入机器人小臂,一起将电机电缆穿入机器人小臂并保证其不会缠绕在衔接轴上。在刺进时不要倾斜而且一起移动起重机。机器人小臂和机器人手腕之间的空隙在圆周上的任何部位都有必要相同。
4. 将电机插头 XM6 和 XP6 穿过机器人小臂中的开口并衔接在板背面上。
6. 用扭矩扳手替换拧紧 20 个内六角螺栓 M10x200-10.9。分几回逐渐添加拧紧扭矩至规则的数值。
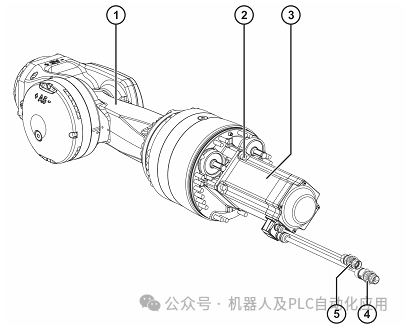
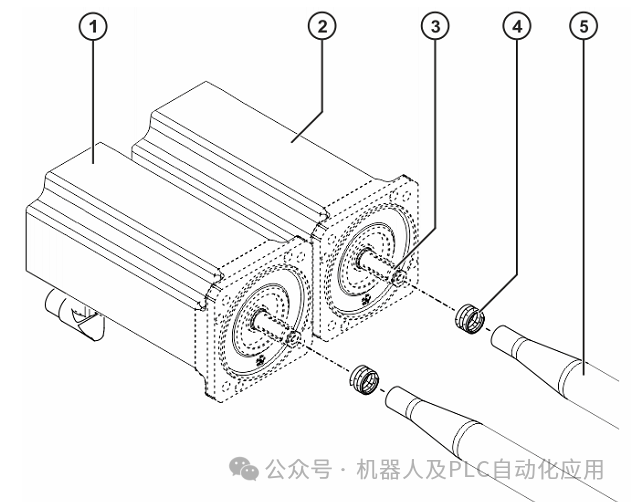
2. 清洁 A5 衔接轴和 A5 电机轴上的齿轮并查看其是否磨损。在损坏和/或磨损时,有必要替换 A5 衔接轴。
4. 将紧缩绷簧装到 A5 电机轴上。假如在拆开电机时电机轴上有垫圈,则在装置新的电机时不允许将其从头装入,而是有必要抛弃处理。
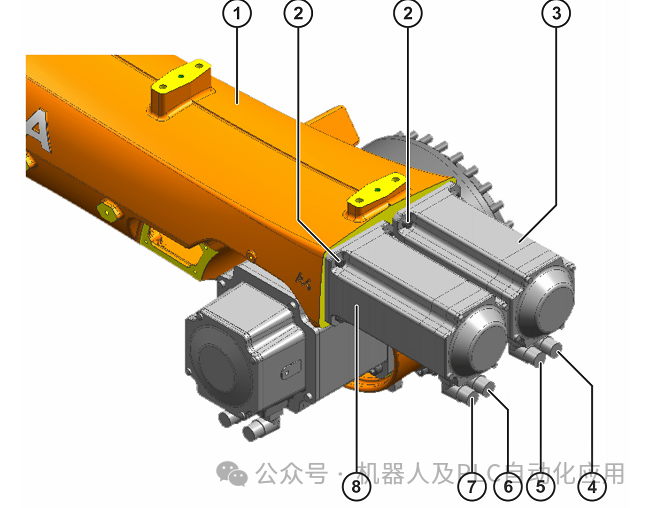
8. 吊起 A5 电机,然后装入机器人小臂;装置时不要倾斜,并留意机器人手腕中的衔接轴是否正确固定(啮合)。
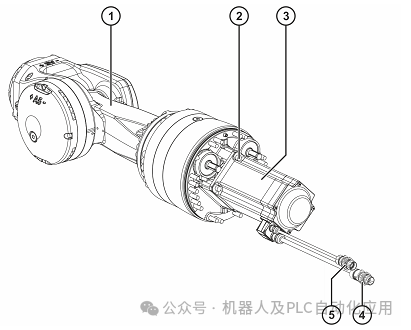
10. 用扭矩扳手对角交织拧紧 4 个内六角螺栓 M8x25-8.8-A2K。分几回逐渐添加拧紧扭矩至规则的数值。
11. 将插头 XM5 和 XP5 衔接到设备插座上。留意插头的针脚和编码。在装置插头时要扭动插头,直到感觉到(防改动)插头卡入到编码中。
声明:本文内容及配图由入驻作者编撰或许入驻协作网站授权转载。文章观念仅代表作者自己,不代表电子发烧友网态度。文章及其配图仅供工程师学习之用,如有内容侵权或许其他违规问题,请联络本站处理。告发投诉
一切的动作都是依照以枪头为顶点来完结移动,XYZ方向切开枪方向不改动,假如
处于主动运转时,先要在手动状况时分挑选需求运转的程序,然后经过钥匙开关切
臂。 一个典型的比如是KUKARobotics AGILUS系列,它具有三个版别。 前面说到的AGILUS
或许使电动机或机械件损坏。当完结接线后,在通电之前,一定要进行电源线和电动机壳体之间的绝缘丈量。3、库卡
MGV电源模块修理PH1013-2840MGV电源修理 库卡电源模块修理
的一部分,用来定位结尾执行器和传感器来完结编程使命。许多(但不是悉数)类似于人类的手臂,有膀子,肘部,
详解S7-1500CPU与ET200SP进行ProfinetIO通讯的装备进程
TensorFlow-DirectML TensorFlow的GPU规模扩展
【youyeetoo X1 windows 开发板体会】支撑语音操控的AIoT智能终端规划
嵌入式学习-ElfBoard ELF 1板卡- Uboot目录结构介绍